

Proprietà della matrice ortogonale, dimostrazione, esempi
- 1842
- 58
- Benedetta Rinaldi
Ne hai uno Matrice ortogonale Quando detto matrice moltiplicata per i suoi risultati di trasposizione nella matrice di identità. Se l'inverso di una matrice è uguale al trasposto, la matrice originale è ortogonale.
Le matrici ortogonali sono caratteristiche che il numero di righe sia uguale al numero di colonne. Inoltre, i vettori di riga sono anche vettori ortogonali unità e l'eruzione dei vettori trasposti.
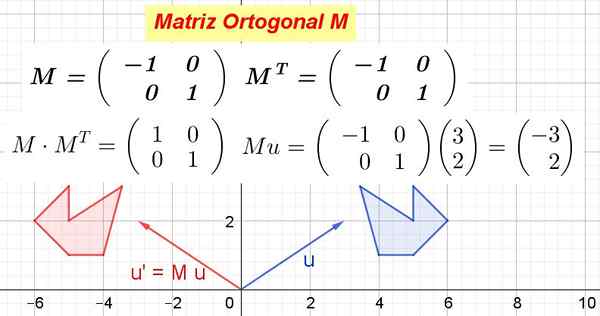 Figura 1. Esempio di matrice ortogonale e come trasforma gli oggetti geometrici. (Preparato da Ricardo Pérez)
Figura 1. Esempio di matrice ortogonale e come trasforma gli oggetti geometrici. (Preparato da Ricardo Pérez) Quando una matrice ortogonale viene moltiplicata per i vettori di uno spazio vettoriale produce a trasformazione isometrica, cioè una trasformazione che non cambia le distanze e conserva gli angoli.
Un rappresentante tipico delle matrici ortogonali sono i matrici di rotazione. Le trasformazioni delle matrici ortogonali su uno spazio vettoriale sono chiamate Trasformazioni ortogonali.
Le trasformazioni geometriche di rotazione e riflesso dei punti rappresentati dai suoi vettori cartesiani vengono realizzate applicando matrici ortogonali sui vettori originali per ottenere le coordinate dei vettori trasformati. È per questo motivo che le matrici ortogonali sono ampiamente utilizzate nell'elaborazione grafica computazionale.
[TOC]
Proprietà
Un array M È ortogonale se moltiplicato per la sua trasposizione MT la matrice di identità si traduce Yo. Allo stesso modo, il prodotto della trasposizione di una matrice ortogonale dalla matrice originale della matrice di identità:
MmT = MT M = i
Come conseguenza dell'affermazione precedente, la trasposta di una matrice ortogonale è uguale alla sua matrice inversa:
MT = M-1.
L'insieme di matrici di dimensione ortogonale n x n Formano il gruppo ortogonale O (n). E il sottoinsieme di O (n) di matrici ortogonali con determinazione +1 Gruppo di matrici speciali il suo (n). Matrici del gruppo Il tuo (n) Sono matrici che producono trasformazioni di rotazione lineare, note anche come Gruppo di rotazioni.
Dimostrazione
Dimostreremo che una matrice è ortogonale se, e solo se, i vettori di riga (o i vettori di colonna) sono ortogonali tra loro e di Norm 1.
Può servirti: il teorema di BayesSupponiamo che i ranghi di una matrice ortogonale n x n siano vettori di dimensione n. Se è indicato da v1, v2,.. ., vN I vettori n sono soddisfatti:

Dove è evidente che l'insieme di vettori di riga è un insieme di vettori ortogonali con la norma.
Esempi
Esempio 1
Mostra che la matrice 2 x 2 che il vettore ha nella sua prima riga V1= (-1 0) e nella sua seconda riga il vettore V2= (0 1) è una matrice ortogonale.
Soluzione: La matrice è costruita M e la sua trasposizione viene calcolata MT:
In questo esempio, la matrice M È un'auto trasposta, vale a dire che la matrice e la sua trasposizione sono identiche. Si moltiplica M per la sua trasposizione MT:

È verificato M MT È uguale alla matrice di identità:
Quando la matrice M Viene moltiplicato per le coordinate di un vettore o un punto, si ottengono nuove coordinate che corrispondono alla trasformazione che la matrice fa sul vettore o sul punto.
La Figura 1 mostra come M Trasforma il vettore O In O' E anche come M Trasformare il poligono blu in poligono rosso. COME M È ortogonale, è quindi una trasformazione ortogonale, che conserva distanze e angoli.
Esempio 2
Supponiamo di avere una matrice 2 x 2 definita nel reais dato dalla seguente espressione:
Trova i valori reali di A, B, C E D in modo che la matrice M Essere una matrice ortogonale.
Soluzione: Per definizione, una matrice è ortogonale se moltiplicata per la sua trasposizione viene ottenuta di conseguenza la matrice di identità. Ricordare che la matrice trasposta è ottenuta dalle righe originali e scambiate per colonne è la seguente uguaglianza:
Può servirti: dominio e contraddizione di una funzione (con esempi)
Eseguire la moltiplicazione della matrice è:

Equando gli elementi della matrice sinistra con gli elementi della matrice di identità a destra, otteniamo un sistema di quattro equazioni con quattro incognite A, B, C e D.
Proponiamo per A, B, C e D le seguenti espressioni basate su motivi trigonometrici Sinus e coseno:

Con questa proposta e a causa dell'identità trigonometrica fondamentale, la prima e la terza equazione nell'uguaglianza degli elementi della matrice è automaticamente soddisfatta. La terza e la quarta equazione sono uguali e nell'uguaglianza di matrice dopo aver sostituito i valori proposti è così:

Il che porta alla seguente soluzione:

Infine, le seguenti soluzioni sono ottenute per la matrice ortogonale M:
Si noti che la prima delle soluzioni ha un determinante +1, quindi appartiene al suo gruppo (2), mentre la seconda soluzione ha un determinante -1 e quindi non appartiene a questo gruppo.
Esempio 3
Data la seguente matrice, trova i valori di A e B per avere una matrice ortogonale.
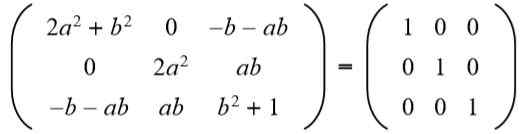
Soluzione: Perché una data matrice sia ortogonale, il prodotto con la sua trasposizione deve essere la matrice di identità. Quindi, il prodotto a matrice della matrice fornita con la matrice trasposta viene realizzato dando il seguente risultato:

Successivamente, il risultato è abbinato alla matrice di identità 3 x 3:
Nella terza colonna della seconda riga hai (A b = 0), Ma A Non può essere zero, perché in tal caso, l'uguaglianza degli elementi della seconda riga e della seconda colonna non sarebbe soddisfatta. Allora necessariamente B = 0. Sostituzione B Per il valore 0 abbiamo:
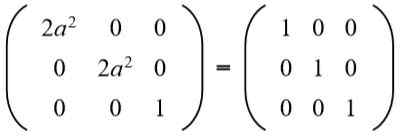
Quindi l'equazione viene risolta: 2a^2 = 1, le cui soluzioni sono: +½√2 e --½√2.
Può servirti: tipi di angoli, caratteristiche ed esempiPrendendo la soluzione positiva a A Si traduce nella seguente matrice ortogonale:
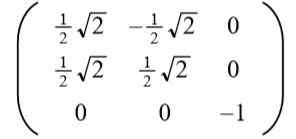
Il lettore può facilmente verificare che i vettori delle righe (e anche i vettori di colonna) siano ortogonali e unità, vale a dire Ortonormal.
Esempio 4
Dimostra che la matrice A le cui righe sono V1 = (0, -1 0), V2 = (1, 0, 0) E V3 = (0 0 -1) È una matrice ortogonale. Inoltre, scopri come vengono trasformati i vettori della base canonica I j k Ai vettori U1, U2 E U3.
Soluzione: Va ricordato che l'elemento (i, j) di una matrice moltiplicata per la sua trasposizione, è il prodotto scalare del vettore della riga (i) per la colonna (j) della trasposizione. Inoltre, questo prodotto è uguale al delta di Kronecker nel caso in cui la matrice sia ortogonale:
Nel nostro caso è così:
V1 • V1 = 0x0 + (-1) x (-1) + 0x0 = 1
V2 • V2 = 1 × 1 + 0x0 + 0x0 = 1
V3 • V3 = 0x0 + 0x0 + (-1) x (-1) = 1
V1 • V2 = 0x1 + (-1) x0 + 0x0 = 0
V2 • V1 = 1 × 0 + 0x (-1) + 0x0 = 0
V2 • V3 = 1 × 0 + 0x (0) + 0x (-1) = 0
V3 • V2 = 0x1 + 0x (0) + (-1) x0 = 0
V1 • V3 = 0x0 + (-1) x (0) + 0x (-1) = 0
V3 • V1 = 0x0 + 0x (-1) + (-1) x0 = 0
Con ciò che viene dimostrato che si tratta di una matrice ortogonale.
Oltretutto u1 = a i = (0, 1, 0); U2 = a j = (-1, 0, 0) e infine U3 = a k = (0, 0, -1)
Riferimenti
- Determinanti e matrici di Anthony Nicolaides (1994). PUBBLICAZIONE PASS.
- Birkhoff e MacLane. (1980). Algebra moderna, ed. Vicens-Vives, Madrid.
- Casteleiro Villalba m. (2004) Introduzione all'algebra lineare. Editoriale ESIC.
- Dave Kirkby (2004) Maths Connect. Heinemann.
- Jenny Olive (1998) Maths: una guida alla sopravvivenza di uno studente. Cambridge University Press.
- Richard J. Brown (2012) Matematica di 30 secondi: le 50 teorie della maggior parte della mente in matematica. Ivy Press Limited.
- Wikipedia. Matrice ortogonale. Recuperato da: è.Wikipedia.com
- Wikipedia. Matrice ortogonale. Recuperato da: in.Wikipedia.com
- « Spiegazione del teorema di overlay, applicazioni, esercizi risolti
- Qual è l'empowerment delle donne e come viene generato? »