

Vettori nello spazio Come graficamente, applicazioni, esercizi
- 4790
- 1264
- Silvano Montanari
UN vettore nello spazio È tutto rappresentato da un sistema di coordinate fornito da X, E E z. Quasi sempre l'aereo XY È il piano della superficie orizzontale e l'asse z rappresenta l'altezza (o la profondità).
Gli assi delle coordinate cartesiane mostrate nella Figura 1, dividono lo spazio in 8 regioni chiamate Ottavers, analogo a come gli assi X - E Dividi il piano in 4 quadranti. Avremo quindi 1 ottante, 2 ° Ocanto e così via.
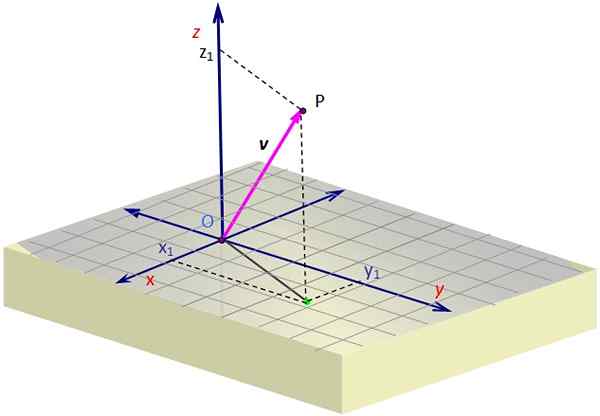
Figura 1. Un vettore nello spazio. Fonte: sé realizzato. La Figura 1 contiene una rappresentazione di un vettore v nello spazio. È necessaria una prospettiva per creare l'illusione di tre dimensioni sul piano dello schermo, che si ottiene disegnando una vista obliqua.
Per graficamente un vettore 3D, è necessario aiutare le linee tratteggiate che determinano le coordinate della proiezione o "ombra" della griglia v Sulla superficie x-and. Questa proiezione inizia in O e termina nel punto verde.
Una volta lì devi continuare per verticale all'altezza (o profondità) necessaria in base al valore di z, Fino a quando non arrivi a P. Il vettore è disegnato da O e termina in p, che nell'esempio è nel 1 ° ocant.
[TOC]
Applicazioni
I vettori nello spazio sono ampiamente utilizzati nella meccanica e in altri rami della fisica e dell'ingegneria, poiché le strutture che ci circondano richiedono la geometria nelle tre dimensioni.
I vettori di posizione nello spazio vengono utilizzati per posizionare gli oggetti rispetto a un punto di riferimento chiamato origine O. Pertanto sono anche strumenti necessari in navigazione, ma non è tutto.
Può servirti: onde elettromagnetiche: teoria, tipi, caratteristiche di MaxwellLe forze che agiscono su strutture come bulloni, supporti, cavi, montanti e altro sono natura vettoriali e sono orientate nello spazio. Per conoscerne l'effetto, è necessario conoscere il tuo indirizzo (e anche il tuo punto di applicazione).
E spesso la direzione di una forza è nota per due punti nello spazio che appartengono alla sua linea di azione. In questo modo la forza è:
F = F O
Dove f è l'entità o il modulo di forza e O È il vettore unitario (modulo 1) diretto lungo la linea di azione di F.
Notazione vettoriale 3D e rappresentazioni
Prima di risolvere alcuni esempi, la notazione di vettori 3D verrà brevemente rivista.
Nell'esempio della Figura 1, Vector V, il cui punto di origine coincide con l'origine o e il cui finale è il punto P, ha le coordinate X E z positivo, mentre coordinate E È negativo. Queste coordinate sono: X1, E1, z1, che sono precisamente le coordinate di P.
Quindi, se abbiamo un vettore legato all'origine, cioè il cui punto di partenza coincide con O, è molto facile indicare le sue coordinate, che saranno quelle del punto estremo o P. Per distinguere tra un punto e un vettore, useremo per le ultime lettere e parentesi audaci, come questo:
v = < x1, E1, z1 >
Mentre il punto P è indicato con parentesi:
P = (x1, E1, z1)
Un'altra rappresentazione utilizza i vettori dell'unità Yo, J E K che definiscono le tre direzioni dello spazio negli assi X, E E z rispettivamente.
Questi vettori sono perpendicolari l'uno all'altro e compongono a Base ortonormali (Vedi Figura 2). Ciò significa che un vettore 3D può essere scritto in termini di loro come:
Può servirti: movimento ondulato: caratteristiche, tipi di onde, esempiv = vX Yo + vE J + vz K
Angoli e registi di cosenos di un vettore
La Figura 2 mostra anche gli angoli dei direttori γ1, γ2 e γ3 rispetto al vettore v rispettivamente con gli assi X, E E z. Conoscere questi angoli e l'entità del vettore, questo è completamente determinato. Inoltre, i coseni degli amministratori soddisfano la seguente relazione:
(cos γ1)2 + (cos γ2)2 + (cos γ3)2 = 1
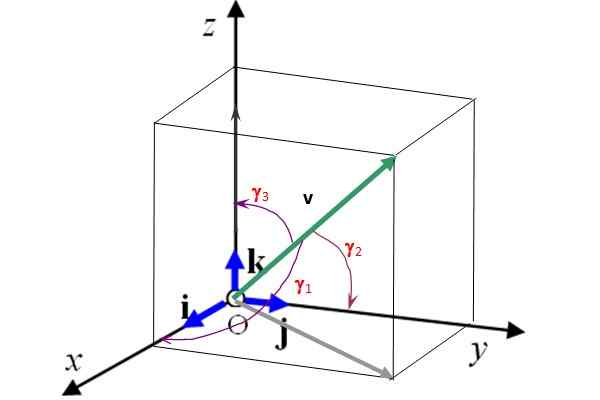 figura 2. Vettori unitari I, J e K determinano le 3 direzioni preferenziali dello spazio. Fonte: sé realizzato.
figura 2. Vettori unitari I, J e K determinano le 3 direzioni preferenziali dello spazio. Fonte: sé realizzato. Esercizi risolti
-Esercizio 1
Nella Figura 2 gli angoli γ1, γ2 e γ3 rispetto al vettore v del modulo 50 modulo con gli assi delle coordinate sono rispettivamente: 75.0º, 60.0º e 34.3 °. Trova i componenti cartesiani di questo vettore e rappresentalo in termini di vettori dell'unità Yo, J E K.
Soluzione
La proiezione del vettore v sull'asse X è vX = 50 . Cos 75º = 12.941. Allo stesso modo la proiezione di v sull'asse E è vE = 50 cos 60 º = 25 e infine sull'asse z è vz = 50. cos 34.3 ° = 41.3. Ora v può essere espresso come:
v = 12.9 Yo + 25.0 J + 41.3 K
-Esercizio 2
Trova tensioni in ciascuno dei cavi che contengono il secchio della figura che è in equilibrio, se il peso di questo è 30 n.
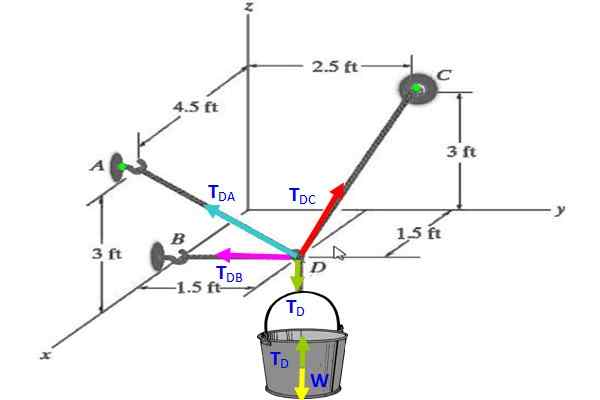 Figura 3. Diagramma di tensioni per l'esercizio 2.
Figura 3. Diagramma di tensioni per l'esercizio 2. Soluzione
Sul secchio, il diagramma del corpo libero indica che TD (verde) compensa il peso W (giallo), quindi tD = W = 30 N.
Nel nodo, il vettore TD È diretto verticalmente verso il basso, quindi:
TD = 30 (-K) N.
Per stabilire le tensioni rimanenti è necessario seguire i seguenti passaggi:
Passaggio 1: trova le coordinate di tutti i punti
A = (4.5; 0; 3) (A è sul piano del muro X-Z)
B = (1.5; 0; 0) (B è sull'asse x)
Può servirti: indirizzo (fisico)C = (0, 2.5, 3) (C è sul piano della parete e z)
D = (1.5; 1.5; 0) (D è sul piano orizzontale x-and)
Passaggio 2: trova i vettori in ciascuna direzione sottraendo le coordinate della fine e dell'inizio
Dà =
DC =
Db =
Passaggio 3: calcola moduli e vettori dell'unità
Un vettore dell'unità è ottenuto per espressione: O = R / r, con R (in grassetto) essendo il vettore e r (senza grassetto) il modulo di detto vettore.
Da = (32 + (-1.5)2 + 32)½ = 4.5; Dc = ((-1.5) 2 + 12 + 32)½ = 3.5
ODà = 4.5 =
ODC = 3.5 =
ODb =
OD =
Passaggio 4: esprimere tutte le tensioni come vettori
TDà = TDà ODà = TDà
TDC = TDC ODc = TDC
TDb = TDb ODb = TDb
TD = 30
Passaggio 5: applicare la condizione di equilibrio statico e risolvere il sistema di equazioni
Infine, la condizione di equilibrio statico viene applicata al secchio, in modo che la somma vettoriale di tutte le forze sul nodo sia nullo:
TDà + TDC + TDb + TD = 0
Poiché le tensioni sono nello spazio, porterà a un sistema a tre equazioni per ciascun componente (X, e e z) di tensioni.
0.67 tDà -0.43 tDC + 0 tDb = 0
-0.33 tDà + 0.29 tDC - TDb = 0
0.67 tDà + 0.86 tDC +0 tDb - 30 = 0
La soluzione è: tDà = 14.9 n; TDà = 23.3 n; TDb = 1.82 n
Riferimenti
- Bedford, 2000. A. Meccanica per l'ingegneria: statico. Addison Wesley. 38-52.
- Figueroa, d. Serie: Physics for Science and Engineering. Volume 1. Cinematica.31-68.
- Fisico. Modulo 8: vettori. Recuperato da: frtl.Utn.Edu.ar
- Hibbeler, R. 2006. Meccanici per ingegneri. Statico. 6a edizione. Azienda editoriale continentale. 15-53.
- Aggiunta di calcolatrice vettore. Recuperato da: 1728.org