

Formule ed equazioni antiderivative, esempi, esercizi

- 3617
- 11
- Lidia Valentini
UN antiderivativo F (x) di una funzione F(x) è anche chiamato primitivo o semplicemente l'integrale indefinito di detta funzione, se in un determinato intervallo Yo, È vero che F '(x) = f (x)
Ad esempio, prendiamo la seguente funzione:
f (x) = 4x3
Un antiderivativo di questa funzione è f (x) = x4, Dal momento derivando da F (x) dalla regola della derivazione per i poteri:

Si ottiene esattamente f (x) = 4x3.
Tuttavia, questo è solo uno dei tanti antiderivativi di f (x), poiché questa altra funzione: g (x) = x4 + 2 È anche, perché derivando da G (x) rispetto a x, è lo stesso che si ottiene indietro f (x).
Controlliamo:
=4x^3)
Ricorda che quello derivato da una costante è 0. Pertanto al termine x4 Puoi aggiungere qualsiasi costante e il suo derivato continuerà a essere 4x3.
Si è concluso che qualsiasi funzione della forma generale f (x) = x4 + C, dove C è una vera costante, funge da antiderivativo di f (x).
Il precedente esempio illustrativo può essere espresso come segue:
df (x) = 4x3 Dx
L'antiderivativo o l'integrale indefinito è espresso con il simbolo ∫, quindi:
F (x) = ∫4x3 dx = x4 + C
Dove la funzione f (x) = 4x3 È chiamato integrazione, e c è il Costante di integrazione.
[TOC]
Esempi di antiderivativi
Figura 1. L'anti -hotley non è altro che un integrale indefinito. Fonte: Pixabay. Trovare un antiderivativo di una funzione è semplice in alcuni casi in cui i derivati sono ben noti. Ad esempio, sii la funzione f (x) = sen x, un non prodigioso per essa è un'altra funzione f (x), in modo tale che quando deriva si ottiene f (x).
Quella funzione può essere:
F (x) = - cos x
Controlliamo che sia vero:
F '(x) = (- cos x)' =- (-sen x) = sin x
Quindi possiamo scrivere:
∫sen x dx = -cos x + c
Oltre a conoscere i derivati, esistono regole di integrazione di base e semplici per trovare antiderivativi o integrale indefiniti.
Può servirti: derivati successiviSii una vera costante, quindi:
1.- ∫kdx = k ∫dx = kx + c
2.- ∫kf (x) dx = k ∫f (x) dx
Se una funzione H (x) può essere espressa come somma o sottrazione di due funzioni, allora il suo integrale indefinito è:
3.- ∫h (x) dx = ∫ [f (x) ± g (x)] dx = ∫f (x) dx ± ∫g (x) dx
Questa è la proprietà della linearità.
IL Regola di potere Per integrali può essere stabilito in questo modo:

Nel caso di n = -1 viene utilizzata la seguente regola:
5.- ∫X -1 Dx = ln x +c
È facile dimostrare che il derivato di ln x è precisamente X -1.
Equazioni differenziali
Un'equazione differenziale è quella in cui l'ignoto è come derivato.
Ora, dall'analisi precedente, è facile rendersi conto che l'operazione inversa al derivato è l'antiderivativo indefinito o integrale.
Sia f (x) = y '(x), cioè derivato da una certa funzione. Possiamo usare la seguente notazione per indicare questo derivato:
=y'(x)=\fracdydx)
Ne consegue immediatamente:
dy = f (x) dx
L'ignoto dell'equazione differenziale è la funzione y (x), quella la cui derivata è f (x). Per cancellarlo, l'espressione precedente è integrata su entrambi i lati, il che equivale all'applicazione dell'antiderivativo:
∫dy = ∫f (x) dx
L'integrale sinistro viene risolto dalla Regola 1 di integrazione, con k = 1 e quindi il ricercato -awaite viene cancellato:
e (x) = ∫f (x) dx = f (x) + c
E poiché C è una costante reale, per sapere quale sia appropriato in ciascun caso, l'istruzione deve contenere informazioni aggiuntive sufficienti per calcolare il valore di C. Questo è chiamato Condizione iniziale.
Vedremo esempi di applicazione di tutto questo nella prossima sezione.
Può servirti: stima puntualeEsercizi antiderivati
- Esercizio 1
Applicare le regole di integrazione per ottenere i seguenti antiderivativi o integrali non definiti delle funzioni fornite, semplificando i risultati il più possibile. È conveniente verificare il risultato per derivazione.
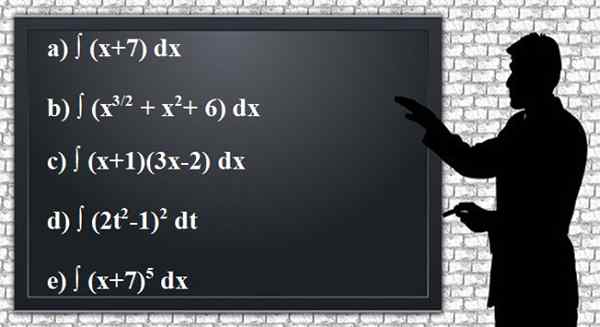 figura 2. Esercizi anterivati o integranti definiti. Fonte: Pixabay.
figura 2. Esercizi anterivati o integranti definiti. Fonte: Pixabay. Soluzione a
Applichiamo per la prima volta la Regola 3, poiché l'integrazione è la somma di due termini:
∫ (x +7) dx = ∫ xdx +∫7dx
Per il primo integrale viene applicata la regola dei poteri:
∫ xdx = (x2 /2)+C1
Nella seconda regola integrale 1 si applica, essendo k = 7:
∫7dx = 7∫dx = 7x + c2
E ora i risultati vengono aggiunti. Le due costanti sono raggruppate in una, genericamente chiamata C:
∫ (x+7) dx = (x2 /2) + 7x + C
Soluzione b
Per linearità questo integrale si decompone in tre integrali più semplici, a cui verrà applicata la regola dei poteri:
∫ (x3/2 + X2 + 6) dx = ∫x3/2 Dx + ∫x2 dx +∫6 dx =

Si noti che per ogni integrale appare una costante di integrazione, ma si incontrano in una singola chiamata C.
Soluzione c
In questo caso, è conveniente applicare la proprietà distributiva della moltiplicazione per sviluppare l'integrazione. Quindi usi la regola dei poteri per trovare ogni integrale separatamente, come nell'anno precedente.
∫ (x+1) (3x-2) dx = ∫ (3x2-2x+3x-2) dx = ∫ (3x2 + X - 2) dx
Il lettore attento osserverà che i due termini centrali sono simili, quindi sono ridotti prima di integrare:
∫ (x+1) (3x-2) dx = ∫3x2 dx + ∫ x dx + ∫- 2 dx = x3 + (1/2) x2 - 2x + c
Soluzione E
Un modo per risolvere l'integrale sarebbe quello di sviluppare energia, come è stato fatto nell'esempio D. Tuttavia, poiché l'esponente è più elevato, sarebbe necessario apportare una variazione variabile, in modo da non dover fare uno sviluppo così lungo.
Può servirti: variabile casuale continuaLa variazione variabile è la seguente:
U = x + 7
Derivando su entrambi i lati questa espressione:
Du = dx
L'integrale si trasforma in un più semplice con la nuova variabile, che viene risolta con la regola dei poteri:
∫ (x+7)5 Dx = ∫ u5 du = (1/6) u6 + C
Infine, la modifica viene restituita per tornare alla variabile originale:
∫ (x+7)5 Dx = (1/6) (x+7)6 + C
- Esercizio 2
Una particella è inizialmente a riposo e si muove lungo l'asse x. La sua accelerazione per t> 0 è data dalla funzione a (t) = cos t. È noto che a T = 0, la posizione è x = 3, tutte nelle unità del sistema internazionale. È richiesto di trovare la velocità V (t) e la posizione x (t) della particella.
Soluzione
Poiché l'accelerazione è la prima derivata dalla velocità rispetto al tempo, hai la seguente equazione differenziale:
a (t) = v '(t) = cos t
Ne consegue che:
v (t) = ∫ cos t dt = sin t + c1
D'altra parte, sappiamo che la velocità è a sua volta il derivato della posizione, quindi ci integriamo di nuovo:
x (t) = ∫ v (t) dt = ∫ (sin t + c1) dt = ∫sen t dt + ∫c1 dt = - cos t + c1 t + c2
Le costanti di integrazione sono determinate dalle informazioni fornite nella dichiarazione. Innanzitutto, dice che la particella era inizialmente a riposo, quindi V (0) = 0:
V (0) = sin 0 + c1 = 0
C1 = 0
Quindi devi x (0) = 3:
x (0) = - cos 0 + c1 0 + c2 = - 1 + C2 = 3 → C2 = 3+1 = 4
Le funzioni di velocità e posizione sono sicuramente così:
v (t) = sen t
x (t) = - cos t + 4
Riferimenti
- Engler, a. 2019. Calcolo integrale. Università nazionale della costa.
- Larson, r. 2010. Calcolo di una variabile. 9na. Edizione. McGraw Hill.
- Testi matematici gratuiti. Antiderivatives. Recuperato da: matematica.LiiBreTexts.org.
- Wikipedia. Antiderivativo. Recuperato da: in.Wikipedia.org.
- Wikipedia. Integrazione indefinita. Recuperato da: è.Wikipedia.org.
- « I 13 tipi di valori e il loro significato (con esempi)
- Formula potenziale elettrico ed equazioni, calcolo, esempi, esercizi »