

Caratteristiche, esempi ed esercizi di vettori simultanei
- 4079
- 1222
- Dott. Rodolfo Gatti
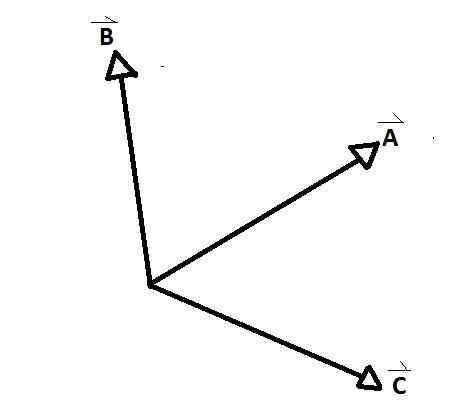
IL Vettori simultanei Sono i gruppi di vettori i cui assi coincidono in un punto, formando tra ogni coppia di loro un angolo interno ed esterno. Un chiaro esempio si osserva nella figura inferiore, dove A, B e C sono vettori simultanei tra loro.
D ed E a differenza del resto non lo sono. Ci sono angoli formati tra vettori simultanei AB, AC e CB. Gli angoli di relazione tra i vettori sono chiamati.
[TOC]
Caratteristiche
-Hanno un punto comune, che coincide con la loro origine: tutte le magnitudini dei vettori simultanei iniziano da un punto comune ai rispettivi estremi.
-L'origine è considerata come il punto di azione vettoriale: è necessario stabilire un punto di azione che sarà direttamente influenzato da ciascuno dei vettori simultanei.
-Il tuo dominio nel piano e nello spazio è R2 e r3 rispettivamente: i vettori simultanei sono liberi di coprire l'intero spazio geometrico.
-Consente notazioni diverse nello stesso gruppo di vettori. Secondo i rami dello studio, sono presenti diverse nozioni nelle operazioni con vettori.
Tipi di vettori
Il ramo dei vettori ha molteplici suddivisioni, tra alcuni che possono essere nominati: il parallelo, perpendicolare, complanari, corrispondente, opposto e unitario. I vettori simultanei compaiono in questo elenco e, come tutti quelli precedentemente nominati, hanno molte applicazioni in diverse scienze.
Sono molto comuni nello studio vettoriale, perché rappresentano una generalizzazione redditizia nelle operazioni con loro. Sia nel piano e nello spazio, i vettori simultanei sono per l'uso attuale per la rappresentazione di diversi elementi e studiano la loro influenza su un particolare sistema.
Notazione vettoriale
Esistono vari modi per rappresentare un elemento vettoriale. I principali e i più noti sono:
cartesiano
Proposto da questo stesso approccio matematico, indica i vettori con un elenco corrispondente alle magnitudini di ciascun asse (x, y, z)
A: (1, 1, -1) spazio A: (1, 1) Piano
Polare
Servono solo a indicare i vettori sul piano, sebbene nel calcolo integrale il componente di profondità sia assegnato. È costituito con una grandezza lineare R e un angolo rispetto all'asse polare Ɵ.
Può servirti: statistiche inferenziali: storia, caratteristiche, a cosa serve, esempiA: (3, 450 ) Piano A: (2, 450 , 3) Spazio
Analitico
Definire le magnitudini del vettore attraverso i Versor. I Versor (R & E + K) rappresentano i vettori dell'unità corrispondenti agli assi X, y E
A: 3i + 2J - 3K
Sferico
Sono simili alla notazione polare, ma con l'aggiunta di un secondo angolo che spazza sul piano XY simboleggiato da Δ.
A: (4, 60O , π/4)
Operazioni con vettori simultanei
I vettori concomitanti sono per lo più usati per definire le operazioni tra vettori, perché è più facile confrontare gli elementi dei vettori quando si verificano in modo concomitante.
Somma (a + b)
La somma dei vettori simultanei mira a trovare il vettore risultante VR. Che, secondo il ramo dello studio, corrisponde a un'azione finale
Ad esempio: 3 stringhe sono legate a, b, c a una scatola, ogni estremità della corda è nelle mani di un soggetto. Ciascuno dei 3 soggetti deve tirare la corda in una direzione diversa dall'altra 2.
A: (ascia, ay, az) b: (bx, by, bz) c: (cx, cy, cz)
A+b+c = (ax+bx+cx; ay+by+cy; az+bz+cz) = VR
La scatola può muoversi solo in una direzione, quindi VR indicherà la direzione e il senso dello spostamento della scatola.
Differenza (a - b)
Esistono molti criteri riguardanti la differenza tra i vettori, molti autori scelgono di escluderlo e affermare che è prevista solo la somma tra i vettori, in cui la differenza è la somma del vettore opposto. La verità è che i vettori algebici possono essere sottratti.
A: (ascia, ay, az) b: (bx, by, bz)
A-b = a + (-b) = (ax-bx; ay-be; az-bz) = [ax + (-bx); ay + (-by); az + (-bz)]
Prodotto scalare (a . B)
Conosciuto anche come prodotto Punto, genera un valore scalare che può essere correlato a diverse magnitudini secondo il ramo dello studio.
Per la geometria indica l'area del parallelogramma formata dalla coppia di vettori simultanei attraverso il metodo parallelogramma. Per la fisica meccanica definisce il lavoro svolto da una forza F Muovendo un corpo a distanza Δr.
Può servirti: proporzionalità composta: spiegazione, tre regole composte, eserciziW. = f . Δr
Come suggerisce il nome, genera un valore scalare ed è definito come segue:
Essere i vettori A e B
A: (ascia, ay, az) b: (bx, by, bz)
-Forma analitica:
( A . B) = | a |.| B |.Cos θ
Dove θ è l'angolo interno tra i due vettori
-Forma algebrica:
( A . B) = (ascia.Bx + ay.di + az.Bz)
Prodotto vettoriale (A x B)
Il prodotto vettoriale o punto tra due vettori, definisce un terzo vettore C questo ha la qualità di essere perpendicolare a B E C. In fisica definisce la coppia vettoriale τ Elemento base della dinamica di rotazione.
-Forma analitica:
| A X B | = | A |.| B |.Sin θ
-Forma algebrica:
(A x b) = = (AX . di - ay . bx)- (ascia . BZ - AZ . BX) J + (Ascia . di - ay . BX) K
-Movimento relativo: rA/b
La base della relatività è il movimento relativo e i vettori simultanei sono la base del movimento relativo. È possibile dedurre posizioni, velocità e accelerazioni relative applicando il seguente ordine di idee.
R A/b = rA - RB ; Posizione relativa per quanto riguarda b
v A/b = vA - vB ; Velocità relativa rispetto a B
A A/b = aA - AB ; Accelerazione relativa del rispetto a B
Esempi: esercizi risolti
Esercizio 1
Lascia che A, B e C vettori simultanei.
A = (-1, 3, 5) b = (3, 5, -2) c = (-4, -2, 1)
-Definire il vettore risultante VR = 2a - 3b + c
2a = (2 (-1), 2 (3), 2 (5)) = (-2, 6, 10)
-3b = (-3 (3), -3 (5), -3 (-2)) = (-9, -15, 6)
VR = 2a + (-3b) + c = (-2, 6, 10) + (-9, -15, 6) + (-4, -2, 1)
VR = ([-2+(-9)+(-4)]; [6+(-15)+(-2)]; (10+6+1))
VR = (-15, -11, 17)
-Definire il prodotto scalare (a . C)
( A . C) = (-1, 3, 5) . (-4, -2, 1) = (-1) (-4) + 3 (-2) + 5 (1) = 4 -6 + 5
( A . C) = 3
-Calcola l'angolo tra A e C
( A . C) = | a |.| C |.Cos θ dove θ è l'angolo più breve tra i vettori




θ = 88.630
-Trova un vettore perpendicolare ad A e B
Per questo è necessario definire il prodotto vettoriale tra (-1, 3, 5) e (3, 5, -2). Come spiegato in precedenza, viene costruita una matrice 3 x 3 in cui la prima riga è composta dall'elenco dei vettori dell'unità (I, J, K). Quindi la seconda e 3a riga è costituita da vettori da gestire, rispettando l'ordine operativo.
Può servirti: notazione decimale(A x b) = = [(-1) . 5 - (3 . 3)] Yo - [(-1) . (-2) - (5 . 3)] J + [(-1) . 5 - (3 . 3)] K
(A x b) = (-5 - 9) Yo - (2 - 15) J + (-5 - 9) K
(A x b) = -14 I + 13 J - 14 K
Esercizio 2
Sia vA e vB I vettori di velocità rispettivamente di A e B. Calcolare la velocità b da a.
VA = (3, -1, 5) VB = (2, 5, -3)
In questo caso, la velocità relativa di B è richiesta da VB/a
VB/a = VB - VA
VB/a = (2, 5, -3) -(3, -1, 5) = (-1, 6, -8)
Questo è il vettore Veloc di B visto da a. Dove un nuovo vettore della velocità B è descritto per riferimento di un osservatore posizionato in A e si muove con la velocità di A.
Esercizi proposti
1 costruzioni 3 vettori A, B e C che sono simultanei e mettono in relazione 3 operazioni tra loro attraverso un esercizio pratico.
2 -vettori A: (-2, 4, -11), B: (1, -6, 9) e C: (-2, -1, 10). Trova vettori perpendicolari a: A e B, C e B, Somma A + B + C.
Vettori a 4 determinazione 3 che sono perpendicolari l'uno all'altro, senza tenere conto degli assi delle coordinate.
5 Definire il lavoro svolto da una forza che solleva un blocco di massa da 5 kg, dal fondo di un pozzo profondo di 20 m.
6-Swamker algebrico che la sottrazione dei vettori è uguale alla somma del vettore opposto. Giustifica i tuoi postulati.
7-denote Un vettore in tutte le notazioni sviluppate in questo articolo. (Cartesiano, polare, analisi e sferico).
8-Le forze magnetiche esercitate su un magnete che poggia su una tabella, sono fornite dai seguenti vettori; V: (5, 3, -2), T: (4, 7, 9), H: (-3, 5, -4). Determina in quale direzione il magnete si muoverà se tutte le forze magnetiche agiscono allo stesso tempo.
Riferimenti
- Geometria e trasformioni euclidee. Clayton W. Schivare. CoUer Corporation, 1 gennaio. 2004
- Come risolvere applicare problemi di matematica l. Moiseiwitsch. CoUer Corporation, 10 apr. 2013
- Concetti di base della geometria. Walter Prenowz, Meyer Jordan. Rowman & Littlefield, 4 ottobre. 2012
- I vettori. Rocío Navarro Lacoba, 7 giugno. 2014
- Algebra lineare. Bernard Kolman, David R. COLLINA. Pearson Education, 2006
- « Caratteristiche, preparazione e applicazioni di Timolphhalein
- Storia, teoria, postulato e rappresentanti dell'atomismo »