

Proprietà di base Ortonormali, esempi ed esercizi
- 2544
- 321
- Zelida Gatti
UN Base ortonormali Si forma con vettori perpendicolari tra loro e il cui modulo vale anche 1 (vettori unitari). Ricorda che una base B in uno spazio vettoriale V, È definito come un insieme di vettori linearmente indipendenti in grado di generare questo spazio.
A sua volta, uno spazio vettoriale è un'entità matematica astratta tra i cui elementi sono vettori, generalmente associati a magnitudini fisiche come velocità, forza e spostamento o anche a matrici, polinomi e funzioni.
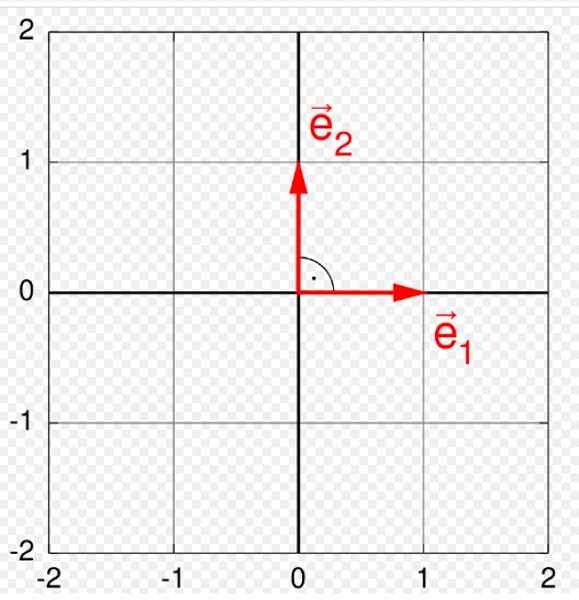
Figura 1. Base ortonormale nel piano. Fonte: Wikimedia Commons. Quartl [CC BY-SA (https: // creativeCommons.Org/licenze/by-sa/3.0)]. I vettori hanno tre elementi distintivi: magnitudo o modulo, direzione e significato. Una base Ortonormal è particolarmente utile per rappresentare e operare con loro, perché qualsiasi vettore che appartiene a un determinato spazio vettoriale V, Può essere scritto come una combinazione lineare dei vettori che formano la base ortonormali.
In questo modo, le operazioni tra vettori, come somma, sottrazione e diversi tipi di prodotti definiti in detto spazio sono analizzate analiticamente.
Tra le basi più utilizzate della fisica c'è la base formata dai vettori dell'unità Yo, J E K rappresentando le tre direzioni distintive dello spazio tridimensionale: alta, ampia e profondità. Questi vettori sono anche noti con il nome di Vettori canonici unitari.
Se, invece, i vettori vengono lavorati su un aereo, sarebbe sufficiente con due di questi tre componenti, mentre solo uno.
[TOC]
Proprietà di basi
1- una base B È il più piccolo set possibile di vettori che generano lo spazio vettoriale V.
2- Gli elementi di B Sono linearmente indipendenti.
3- Qualsiasi base B di uno spazio vettoriale V, consente di esprimere tutti i vettori di V come una combinazione lineare di esso e questa forma è unica per ogni vettore. Quindi a B È anche noto come Sistema del generatore.
4- Lo stesso spazio vettoriale V può avere basi diverse.
Può servirti: forza centrifuga: formule, come viene calcolato, esempi, eserciziEsempi di basi
Sotto diversi esempi di basi e basi ortonormali in generale:
La base canonica in ℜ N
Chiamata base naturale o base standard di ℜ N, Dove ℜ N È spazio N-dimensionale, Ad esempio, lo spazio tridimensionale è ℜ 3. Al valore di N È chiamato dimensione dello spazio vettoriale e indica come Dim (V).
Tutti i vettori che appartengono a ℜ N Sono rappresentati da N-USA Ordinato. Per lo spazio ℜN, La base canonica è:
E1 =; E2 =; EN =
In questo esempio abbiamo usato la notazione con parentesi o "staffe" e audace per i vettori dell'unità E1, E2, E3..
La base canonica in ℜ3
Vettori di famiglia Yo, J E K Ammettono questa stessa rappresentazione e sono sufficienti per tre per rappresentare i vettori in ℜ 3:
Yo =; J =; K =
Significa che la base può essere espressa come segue:
B = ; ;
Per verificare che siano linearmente indipendenti, il fattore determinante formato con loro vettori è non nullo e anche uguale a 1:

F = N = 4Yo -7J + 0K N.
Perciò Yo, J E K costituire un sistema di generatori ℜ 3.
Altre basi ortonormali in ℜ3
La base standard descritta nella sezione precedente non è l'unica base ortonormale in ℜ3. Qui abbiamo ad esempio le basi:
B1 = ; ;
B2 = ; ;
Si può dimostrare che queste basi sono ortonormali, per questo ricordiamo le condizioni che devono essere soddisfatte:
Può servirti: ottica ondulata-Vettori che formano la base devono essere ortogonali tra loro.
-Ognuno di essi deve essere unitario.
Possiamo verificarlo sapendo che il fattore determinante da loro deve essere non nullo ed uguale a 1.
Base b1 È proprio quello delle coordinate cilindriche ρ, φ e z, un altro modo per esprimere i vettori nello spazio.
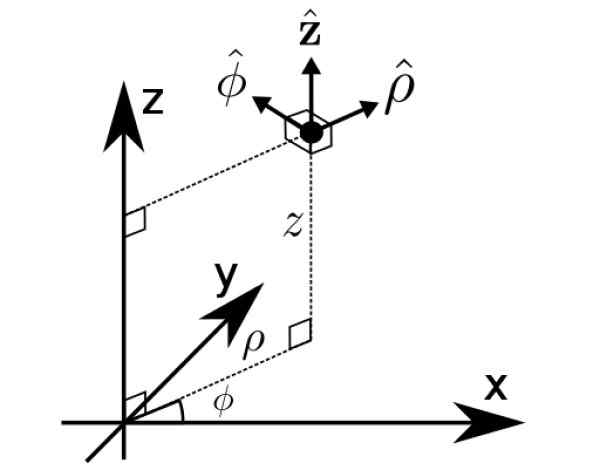 figura 2. Coordinate cilindriche. Fonte: Wikimedia Commons. Math Buff [CC BY-S (https: // creativeCommons.Org/licenze/by-sa/4.0)].
figura 2. Coordinate cilindriche. Fonte: Wikimedia Commons. Math Buff [CC BY-S (https: // creativeCommons.Org/licenze/by-sa/4.0)]. Esercizi risolti
- Esercizio 1
Mostra che la base b = ; ; è Ortonormal.
Soluzione
Per dimostrare che i vettori sono perpendicolari l'uno all'altro, useremo il prodotto scalare, chiamato anche punto interno o di prodotto di due vettori.
Lascia che due vettori O E v, Il tuo prodotto scalare è definito da:
O • v = O.v. cosθ
Per distinguere i vettori dai loro moduli useremo grassetto per le prime e normali lettere per quest'ultimo. θ è l'angolo tra O E v, Pertanto, se sono perpendicolari, significa che θ = 90º e il prodotto scalare è nullo.
In alternativa, se i vettori sono riportati in termini di componenti: O =
O • v = OX .vX + OE .vE + Oz .vz
In questo modo, i prodotti scalari tra ogni coppia di vettori sono, rispettivamente:
i) • = (3/5).(-4/5) + (4/5).((3/5) + 0.0 = (-12/25) + (12/25) = 0
Ii) • = 0
iii) • = 0
Per la seconda condizione viene calcolato il modulo di ciascun vettore, che è ottenuto da:
│u │ = √ (uX2 + OE2 + Oz2)
Pertanto, i moduli di ciascun vettore sono:
│ = √ [(3/5)2 + (4/5)2 + 02)] = √ [(9/25) + (16/25)] = √ (25/25) = 1
│ = √ [(-4/5)2 + (3/5)2 + 02)] = √ [(16/25) + (9/25)] = √ (25/25) = 1
Può servirti: seconda condizione di equilibrio: spiegazione, esempi, esercizi│ = √ [02 + 02 + 12)] = 1
Pertanto i tre sono vettori di unità. Infine, il determinante che formano non è nullo e uguale a 1:

- Esercizio 2
Scrivi le coordinate vettoriali W = In termini di base precedente.
Soluzione
Per fare ciò viene utilizzato il seguente teorema:
Sia b = v1, v2, v3,.. vN Una base ortonormale nello spazio V con prodotto domestico, il vettore W È rappresentato da B come segue:
W = <W•v1> v1 + <W•v2> v2 +<W•v3> v3 +.. <W•vN> vN
Ciò significa che possiamo scrivere il vettore alla base B, attraverso coefficienti <W•v1>, <W•v2>, .. <W•vN>, per i quali devi calcolare i scalari indicati:
• = (2).(3/5) + (3).(4/5) + 1.0 = (6/5) + (12/5) = 18/5
• = (2).(-4/5) + (3).(3/5) + 1.0 = (-8/5) + (9/5) = 1/5
• = 1
Con i prodotti scalari ottenuti, viene costruita una matrice, chiamata Matrix di coordinate di w.
Pertanto il vettore coordina W Nella base B sono espressi attraverso:
[W"B= [(18/5); (1/5); 1"
La matrice di coordinate non è il vettore, poiché un vettore non è uguale alle sue coordinate. Questi sono solo un insieme di numeri che servono ad esprimere il vettore in una determinata base, non il vettore in quanto tale. Dipendono anche dalla base selezionata.
Infine, seguendo il teorema, il vettore W sarebbe espresso come segue:
W = (18/5) v1 + (1/5) v2 + v3
Con: v1 =; v2 =; v3 =, Cioè i vettori di base B.
Riferimenti
- Larson, r. Fondamenti di algebra lineare. 6 °. Edizione. Apprendimento del Cengage.
- Larson, r. 2006. Calcolo. 7 °. Edizione. Volume 2. McGraw Hill.
- Salas, J. algebra lineare. Argomento 10. Basi ortonormali. Recuperato da: OCW.Uc3m.È.
- Siviglia University. Coordinate cilindriche. Base vettoriale. Recuperato da: Laplace.noi.È.
- Wikipedia. Base ortonormali. Recuperato da: è.Wikipedia.org.
- « Preparati di reazione di fehling, agenti attivi, esempi, usi
- Secondo giurisprudenza di Newton, esperimenti ed esercizi »