

Metodi di programmazione non lineari ed esercizi
- 2629
- 662
- Baldassarre Ross
IL Programmazione non lineare È il processo di ottimizzazione di una funzione che dipende da diverse variabili indipendenti, che a loro volta sono soggette a restrizioni.
Se una o più delle restrizioni o se la funzione per massimizzare o minimizzare (chiamata Funzione obiettivo), non è espresso come una combinazione lineare delle variabili, quindi esiste un problema di programmazione non lineare.
Figura 1. Problema di programmazione non lineare (NLP). in cui G è la funzione (non lineare) da ottimizzare nella regione verde, determinata dalle restrizioni. Fonte: f. Zapata. E quindi le procedure e i metodi di programmazione lineare non possono essere utilizzati.
Ad esempio, il metodo ben noto non può essere utilizzato Simplex, che si applica solo quando la funzione e le restrizioni oggettive sono tutte una combinazione lineare delle variabili del problema.
[TOC]
Metodi di programmazione lineari
Per la programmazione non lineare i metodi principali da utilizzare sono:
1.- Metodi grafici.
2.- Moltiplicatori di Lagrange per esplorare il bordo della regione della soluzione.
3.- Calcolo del gradiente per esplorare le estremità della funzione obiettivo.
4.- Il metodo dei passaggi discendenti, per trovare i punti del gradiente zero.
5.- Metodo modificato dei moltiplicatori di Lagrange (con la condizione di Karush-Kuhn-Tucker).
Esempio di soluzione con metodo grafico
Un esempio di soluzione con il metodo grafico è ciò che può essere visto nella Figura 2:
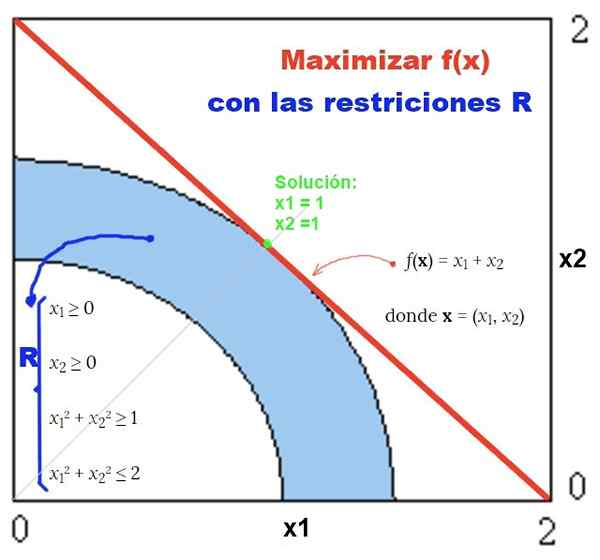 figura 2. Esempio di problema non lineare con restrizioni non lineari e la sua soluzione grafica. Fonte: f. Zapata.
figura 2. Esempio di problema non lineare con restrizioni non lineari e la sua soluzione grafica. Fonte: f. Zapata. Esercizi
- Esercizio 1 (metodo grafico)
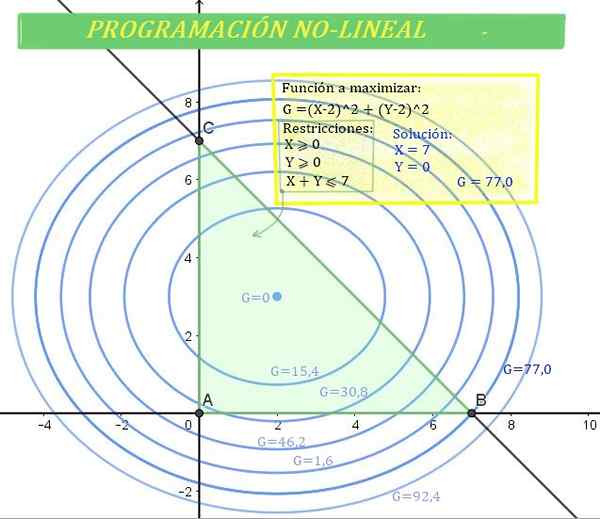
Il guadagno G di una determinata azienda dipende dalla quantità venduta del prodotto X e dalla quantità venduta del prodotto e, inoltre il guadagno è determinato dalla seguente formula:
Può servirti: binomiale coniugata: come viene risolto, esempi, eserciziG = 2 (x - 2)2 + 3 (e - 3)2
È noto che gli importi X e Y hanno le seguenti restrizioni:
X≥0; Y≥0 e x + e ≤ 7
Determina i valori di xey che producono il guadagno massimo.
 Figura 3. Il guadagno dell'azienda può essere matematicamente modellato per trovare il guadagno massimo mediante programmazione non lineare. Fonte: Pixabay.
Figura 3. Il guadagno dell'azienda può essere matematicamente modellato per trovare il guadagno massimo mediante programmazione non lineare. Fonte: Pixabay. Soluzione
In questo problema la funzione obiettivo non è lineare, mentre le disuguaglianze che definiscono le restrizioni sono. È un problema di Programmazione non lineare.
Per la soluzione di questo problema, verrà scelto il metodo grafico.
Innanzitutto, la regione della soluzione verrà determinata, che è data dalle restrizioni.
Come x≥0; Y≥0, la soluzione deve essere cerca nel primo quadrante del piano XY, ma anche se si deve soddisfare che x + y ≤ 7, la soluzione è nel semiplano inferiore della linea x + y = 7.
La regione della soluzione è l'intersezione del primo quadrante con il semiplano inferiore della linea, che dà origine a una regione triangolare in cui si trova la soluzione. È lo stesso come indicato nella Figura 1.
D'altra parte, il guadagno G può essere rappresentato anche nel piano cartesiano, poiché la sua equazione è quella di un'ellisse con il centro (2,3).
L'ellisse è mostrata nella Figura 1 per diversi valori G. Un valore più elevato di g, maggiore guadagno.
Ci sono soluzioni che appartengono alla regione, ma non danno il valore massimo G, mentre altre, come G = 92.4, sono fuori dalla zona verde, cioè la zona di soluzione.
Quindi, il valore massimo di G, in modo tale che X e y appartiene alla regione della soluzione corrisponde a:
Può servirti: probabilità teorica: come tirarlo fuori, esempi, eserciziG = 77 (guadagno massimo), che si verifica per x = 7 e y = 0.
È interessante notare che il guadagno massimo si verifica quando la quantità di vendite di prodotti ed è nullo, mentre la quantità di prodotto X raggiunge il massimo valore possibile.
- Esercizio 2 (Metodo analitico: moltiplicatori di Lagrange)
Trova la soluzione (x, y) che rende la funzione f (x, y) = x2 + 2 e2 essere massimo nella regione g (x, y) = x2 + E2 - 1 = 0.
Soluzione
È chiaramente un problema di programmazione non lineare, poiché sia la funzione obiettivo F (x, y) che la restrizione g (x, y) = 0, non sono una combinazione lineare delle variabili xey.
Verrà utilizzato il metodo dei moltiplicatori Lagrange, che richiede innanzitutto la definizione della funzione di Lagrange L (x, y, λ):
L (x, y, λ) = f (x, y) - λ g (x, y) = x2 + 2 e2 - λ (x2 + E2 - 1)
Dove λ è un parametro chiamato Moltiplicatore di Lagrange.
Per determinare i valori estremi della funzione obiettiva f, nella regione della soluzione data dalla restrizione g (x, y) = 0, questi passaggi vengono seguiti:
-Trova i derivati parziali della funzione di Lagrange L, rispetto a x, y, λ.
-Zero ogni derivato.
Qui la sequenza di queste operazioni:
- ∂l/∂x = 2x - 2λx = 0
- ∂l/∂y = 4y - 2λy = 0
- ∂l/∂λ = -(x2 + E2 - 1) = 0
Possibili soluzioni di sistema
Una possibile soluzione di questo sistema è λ = 1 per soddisfare la prima equazione, nel qual caso y = 0 per soddisfare la seconda.
Questa soluzione implica che x = 1 o x = -1 in modo che la terza equazione sia soddisfatta. In questo modo sono state ottenute due soluzioni S1 e S2:
S1: (x = 1, y = 0)
S2: (x = -1, y = 0).
L'altra alternativa è che λ = 2 per la seconda equazione da soddisfare, indipendentemente dal valore e.
Può servirti: limite di fermat: ciò che consiste ed esercitazioni risolteIn questo caso, l'unico modo per soddisfare la prima equazione è che x = 0. Considerando la terza equazione, ci sono solo due possibili soluzioni, che chiameremo S3 e S4:
S3: (x = 0, y = 1)
S4: (x = 0, y = -1)
Per sapere quale o quale di queste soluzioni massimizza la funzione obiettivo, procedere a sostituire in f (x, y):
S1: F (1, 0) = 12 + 2.02 = 1
S2: F (-1, 0) = (-1)2 + 2.02 = 1
S3: F (0, 1) = 02 + 2.12 = 2
S4: f (0, -1) = 02 + ventuno)2 = 2
Concludiamo che le soluzioni che massimizzano f, quando xey appartengono alla circonferenza g (x, y) = 0 sono s3 e s4.
Le coppie di valori (x = 0, y = 1) y (x = 0, y = -1) massimizzano f (x, y) nella regione della soluzione g (x, y) = 0.
- Esercizio 3 (gradiente null)
Trova soluzioni (x, y) per la funzione obiettivo:
f (x, y) = x2 + 2 e2
Essere massimo nella regione g (x, y) = x2 + E2 - 1 ≤ 0.
Soluzione
Questo esercizio è simile all'esercizio 2, ma la regione della soluzione (o restrizione) si estende alla regione interna della circonferenza g (x, y) = 0, che è al cerchio g (x, y) ≤ 0. Ciò include la circonferenza e la sua regione interna.
La soluzione di confine era già determinata nell'esercizio 2, ma è necessario esplorare la regione interna.
Per fare ciò, il gradiente della funzione f (x, y) deve essere calcolato e uguale a zero, per cercare valori estremi nella regione della soluzione. Ciò equivale a calcolare i derivati parziali di F rispetto a X e rispettivamente e equalizzare zero:
∂f/∂x = 2 x = 0
∂f/∂y = 4 y = 0
Questo sistema di equazioni ha l'unica soluzione (x = 0, y = 0) che appartiene al cerchio G (x, y) ≤ 0.
Sostituzione di questo valore nei risultati della funzione F:
f (0, 0) = 0
In conclusione, il valore massimo che prende la funzione nella regione della soluzione è 2 e si verifica sul bordo della regione della soluzione, per valori (x = 0, y = 1) y (x = 0, y = -1).
Riferimenti
- Avriel, m. 2003. Programmazione non lineare. Dover Publishing.
- Bazaraa. 1979. Programmazione non lineare. John Wiley & Sons.
- Bertsekas, d. 1999. Programmazione non lineare: 2a edizione. Athena Scientific.
- Nocedal, J. 1999. Ottimizzazione numerica. Springer-Verlag.
- Wikipedia. Programmazione non lineare. Recuperato da: è.Wikipedia.com
- « Varolio ponte (protuberanza anulare) anatomia, funzioni
- Caratteristiche informative del bollettino, a cosa serve, parti, esempi »